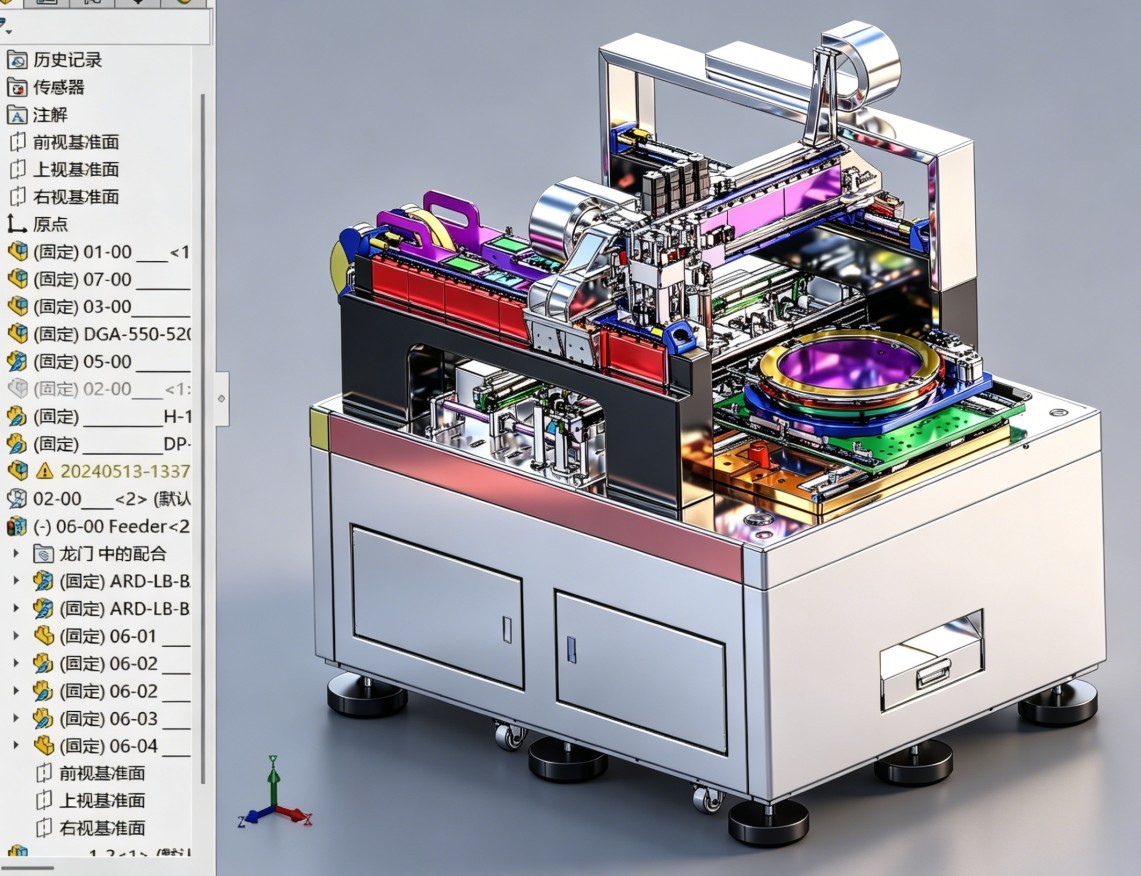
图纸可以编辑有参数,带运动模拟!采用凸轮机构设计适合高速稳定的芯片搬运场合!不需要编程即可完成点到点的移动!
凸轮搬运机械手(俗称 PPU 机械手)是一种用凸轮 + 连杆 / 滑块把电机旋转变成X-Z 平面取放轨迹的高速精密搬运模组,主打快、稳、准、省,在半导体、电子、3C、锂电、包装等行业极常见。
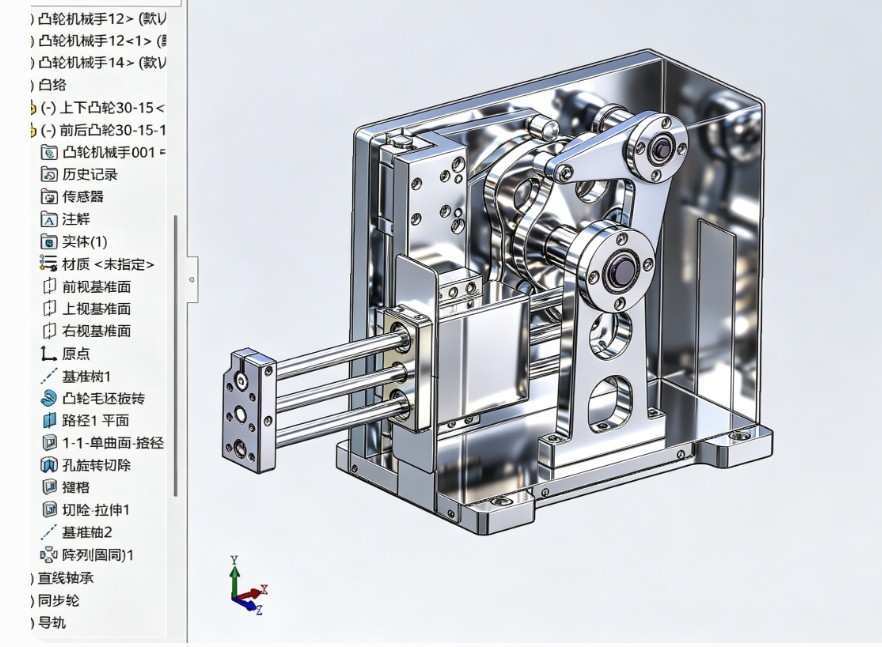
动力:伺服 / 步进电机驱动一根或两根凸轮轴。
运动转换:
盘形 / 圆柱凸轮旋转 → 轮廓推动随动器 / 摆杆 → 实现Z 轴升降。
另一凸轮或槽轮 → 推动水平滑台 → 实现X 轴平移。
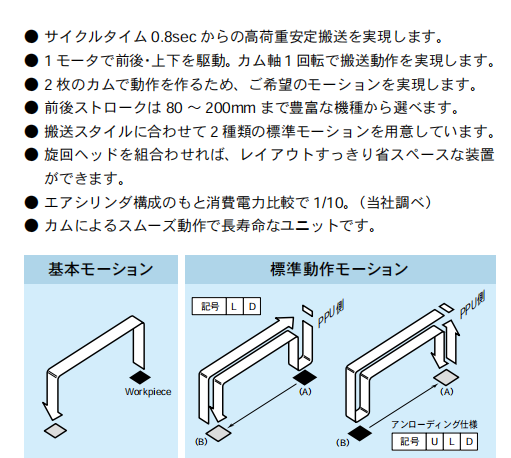
复合轨迹:两轴同步,形成 **“下降取料→上升→平移→下降放料→复位”** 的矩形 / 圆角矩形闭环。
末端:真空吸嘴或夹爪,完成抓取 / 释放。
驱动单元:伺服电机 + 减速机 + 联轴器(高精度);步进电机(经济型)。
凸轮机构:精密磨削盘形凸轮 / 圆柱槽凸轮 + 随动器(轴承)。
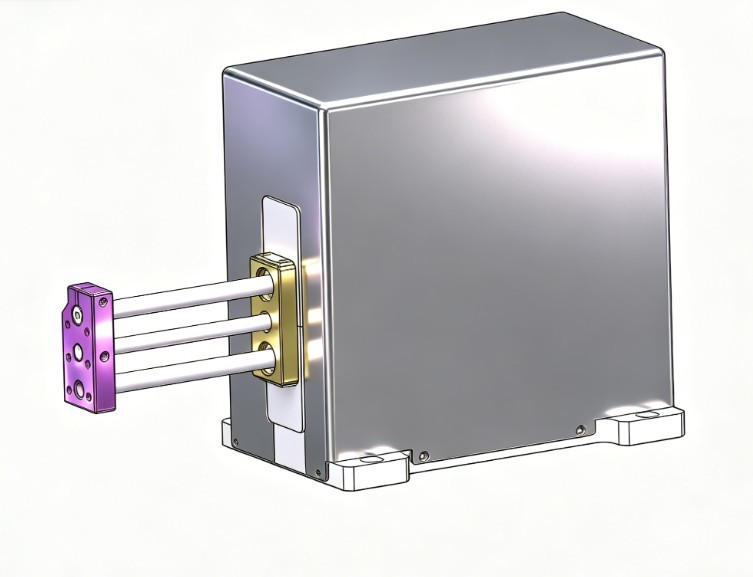
运动滑台:
Z 轴:竖直导轨 + 升降板。
X 轴:水平导轨 + 移动板,通常装在 Z 轴滑台上。
机架与安装板:铝合金 / 钢板,紧凑模块化。
末端执行器:真空吸盘、气动夹爪、磁吸头。
辅助:缓冲器、限位开关、原点传感器。
高速:节拍可达0.2–0.5 秒 / 次,远快于气动机械手。
高重复精度:纯机械传动,±0.02 mm,不受气压波动影响。
高稳定性:凸轮曲线平滑,运动冲击小、振动低、噪音小。
长寿命:凸轮与轴承滚动摩擦,寿命可达5 万小时以上。
低成本:结构简单、零件少、维护容易、性价比高。
同步性好:可与主机传动硬连接,节拍永不乱,安全性高。

| # | 文件名称 | 大小 |
|---|---|---|
| 1 |  www.semimodel.comATPA20L050_A_H12.sldasm
www.semimodel.comATPA20L050_A_H12.sldasm
|
226.5K |
| 2 |
www.semimodel.comATPA20L050_A_H12_a.sldprt
|
593.5K |
| 3 |
www.semimodel.comBGFRCB6804ZZ_35.sldasm
|
209.5K |
| 4 |
www.semimodel.comBGFRCB6901ZZ_25.SLDASM
|
131.06K |
| 5 |
www.semimodel.comCFU6_16.SLDASM
|
122.75K |
| 6 |
www.semimodel.comCFU6_16body.SLDPRT
|
99.85K |
| 7 |
www.semimodel.comHGH15_2.SLDPRT
|
63.31K |
| 8 |
www.semimodel.comHGR15_1-1.SLDPRT
|
302.5K |
| 9 |
www.semimodel.comLMU_N12.sldprt
|
180.5K |
| 10 |
www.semimodel.combearingB6804ZZ.sldprt
|
203K |
| 11 |
www.semimodel.combearingB6901ZZ.sldprt
|
203.5K |
| 12 |
www.semimodel.comhousing_BGFRCB6804ZZ_35.sldprt
|
172.5K |
| 13 |
www.semimodel.comhousing_BGFRCB6901ZZ_25.SLDPRT
|
94.87K |
| 14 |
www.semimodel.comnut_cua_6.sldprt
|
162.5K |
| 15 |
www.semimodel.com上下凸轮30-15.SLDPRT
|
154.54K |
| 16 |
www.semimodel.com凸轮机械手001.SLDASM
|
2.48M |
| 17 |
www.semimodel.com凸轮机械手01.SLDPRT
|
111.08K |
| 18 |
www.semimodel.com凸轮机械手02.SLDPRT
|
134.95K |
| 19 |
www.semimodel.com凸轮机械手03.SLDPRT
|
221.81K |
| 20 |
www.semimodel.com凸轮机械手04.SLDPRT
|
111.99K |
| 21 |
www.semimodel.com凸轮机械手05.SLDPRT
|
67.66K |
| 22 |
www.semimodel.com凸轮机械手06.SLDPRT
|
275.63K |
| 23 |
www.semimodel.com凸轮机械手07.SLDPRT
|
339K |
| 24 |
www.semimodel.com凸轮机械手08.SLDPRT
|
235.78K |
| 25 |
www.semimodel.com凸轮机械手09.SLDPRT
|
214.13K |
| 26 |
www.semimodel.com凸轮机械手10.SLDPRT
|
104.69K |
| 27 |
www.semimodel.com凸轮机械手11.SLDPRT
|
193.35K |
| 28 |
www.semimodel.com凸轮机械手12.SLDPRT
|
308.5K |
| 29 |
www.semimodel.com凸轮机械手13.SLDPRT
|
145.5K |
| 30 |
www.semimodel.com凸轮机械手14.SLDPRT
|
229K |
| 31 |
www.semimodel.com凸轮机械手15.SLDPRT
|
81.97K |
| 32 |
www.semimodel.com凸轮机械手16.SLDPRT
|
125K |
| 33 |
www.semimodel.com凸轮机械手17.SLDPRT
|
83.14K |
| 34 |
www.semimodel.com前后凸轮50-16-1.SLDPRT
|
279.5K |