图纸为中性格式,任何三维软件都可以打开,业界半导体成熟模块的图纸,优化的十分的详细!赠送VTM行业报告一份!
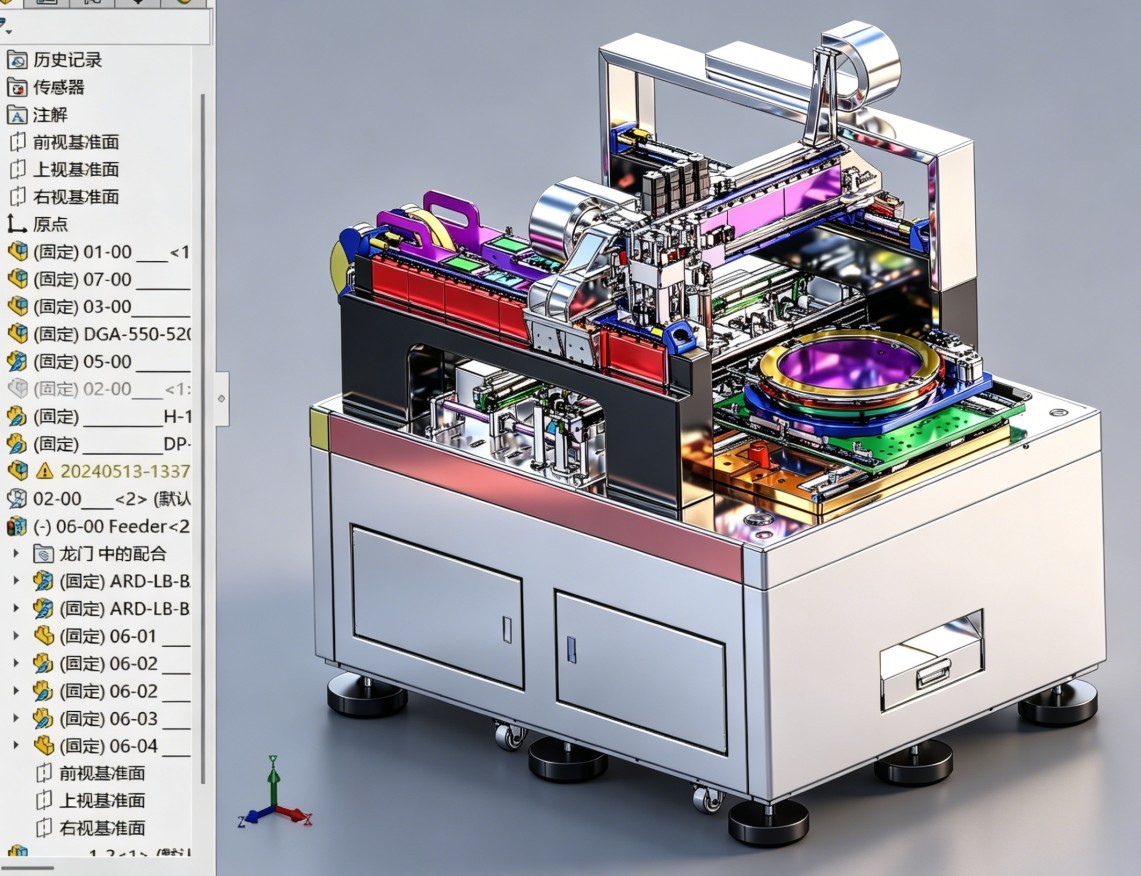
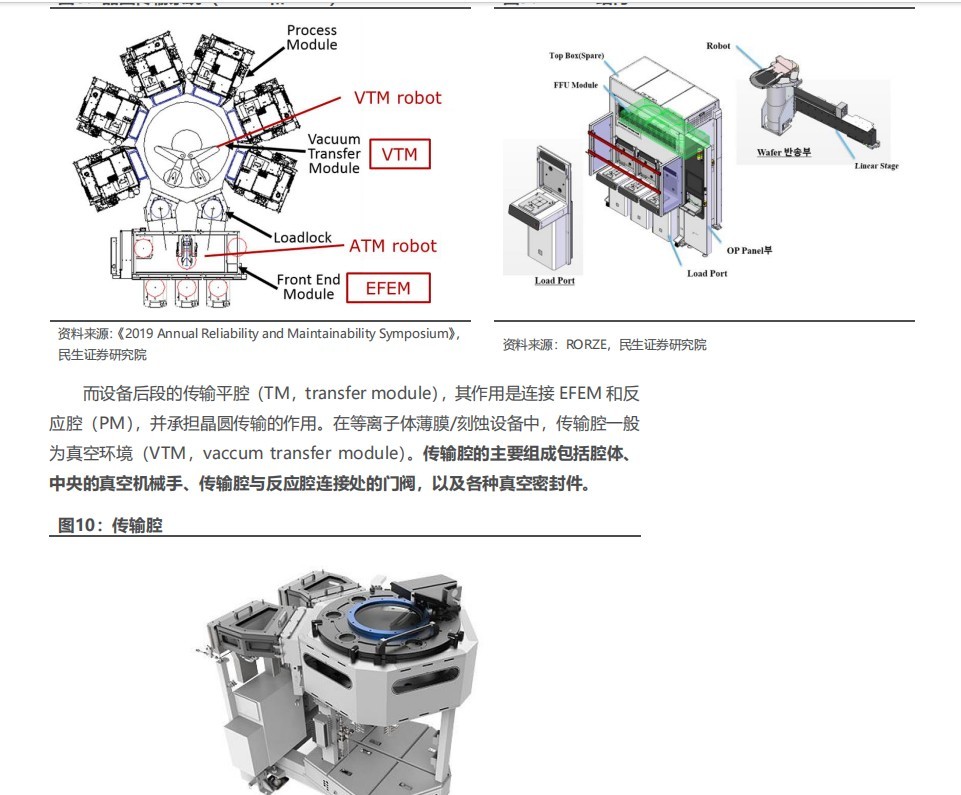
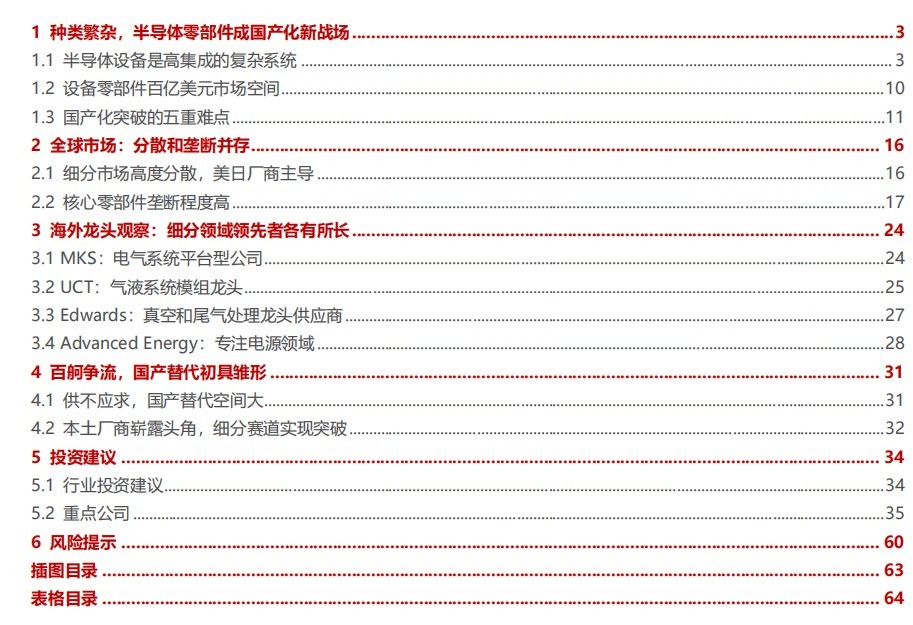
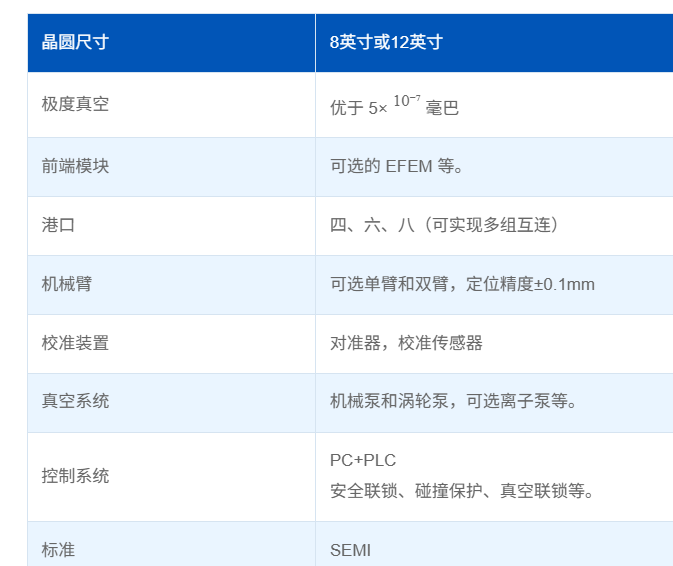
在半导体前道制造(如等离子体刻蚀 Etch、薄膜沉积 CVD/PVD、离子注入)以及先进封装(如 混合键合、高性能 3D TSV 工艺)中,真空传输模块(Vacuum Transfer Module, VTM) 是多腔体集群设备的核心硬件骨骼。
它的作用是:在不破坏超高真空环境的前提下,实现晶圆在不同工艺腔体(之间的高速度、高精度、零污染传输。
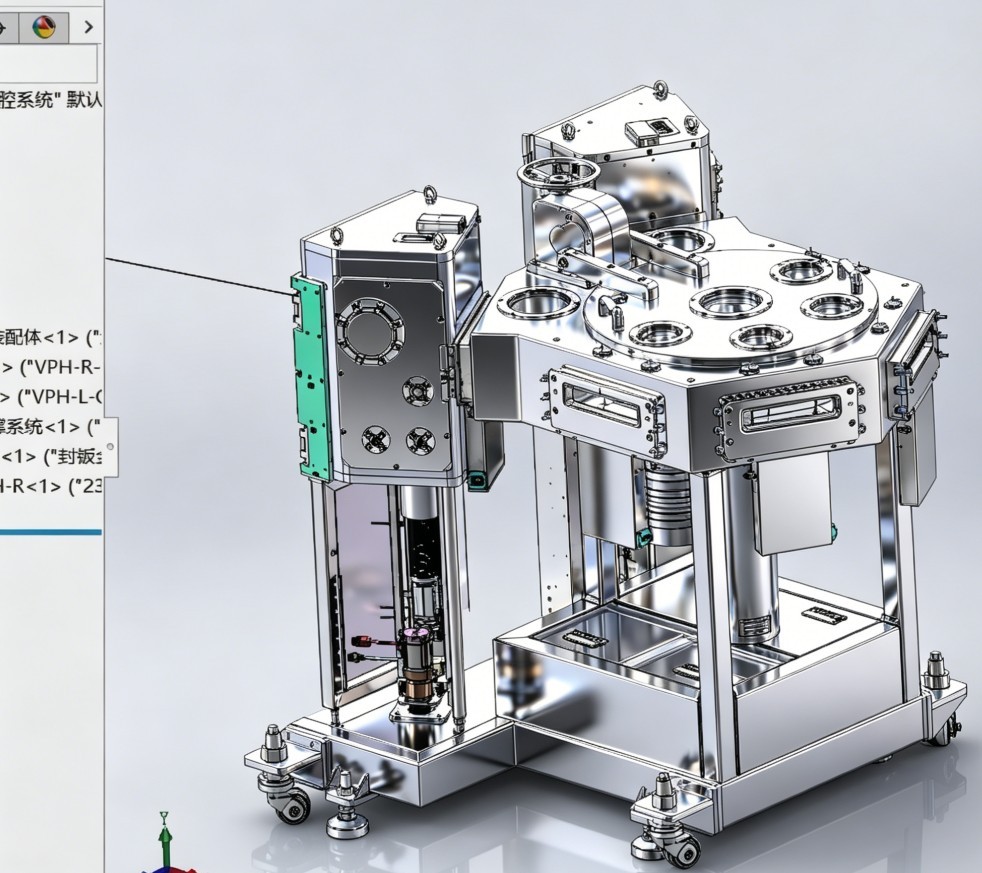
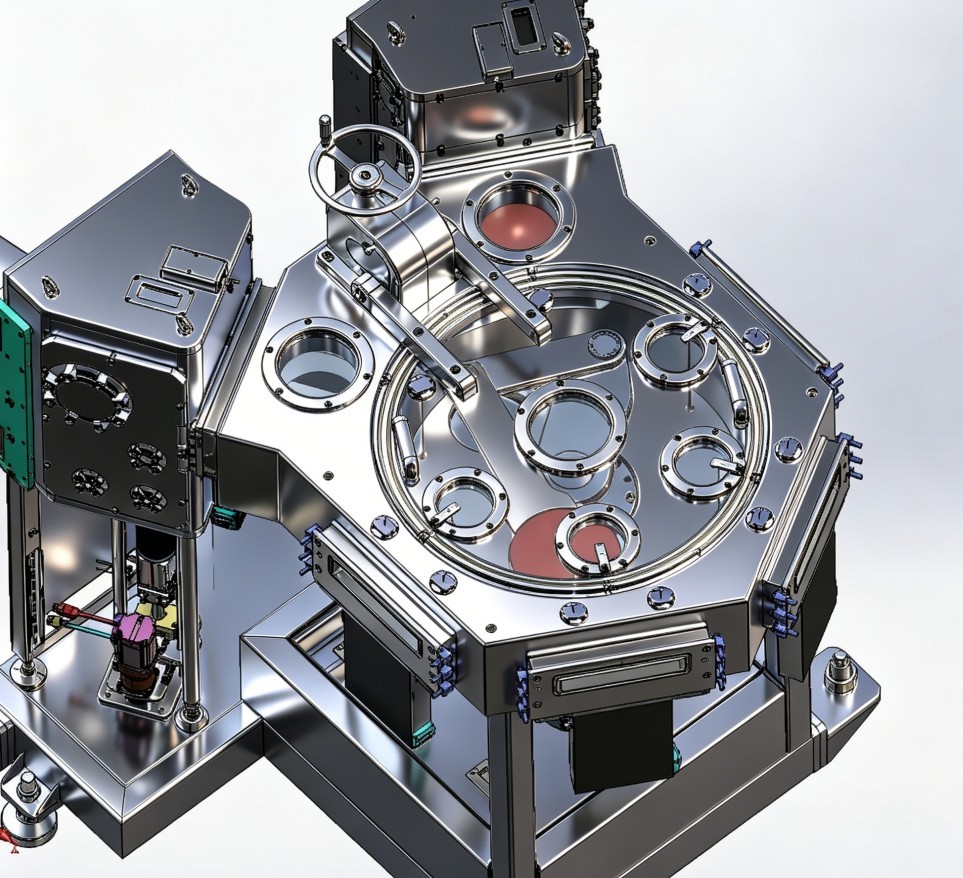
VTM 通常位于集群系统的中心,外观多采用四边形、六边形或八边形等多边形腔体设计(也称 Facet 面),四周像众星拱月一样环绕着各种功能模块。
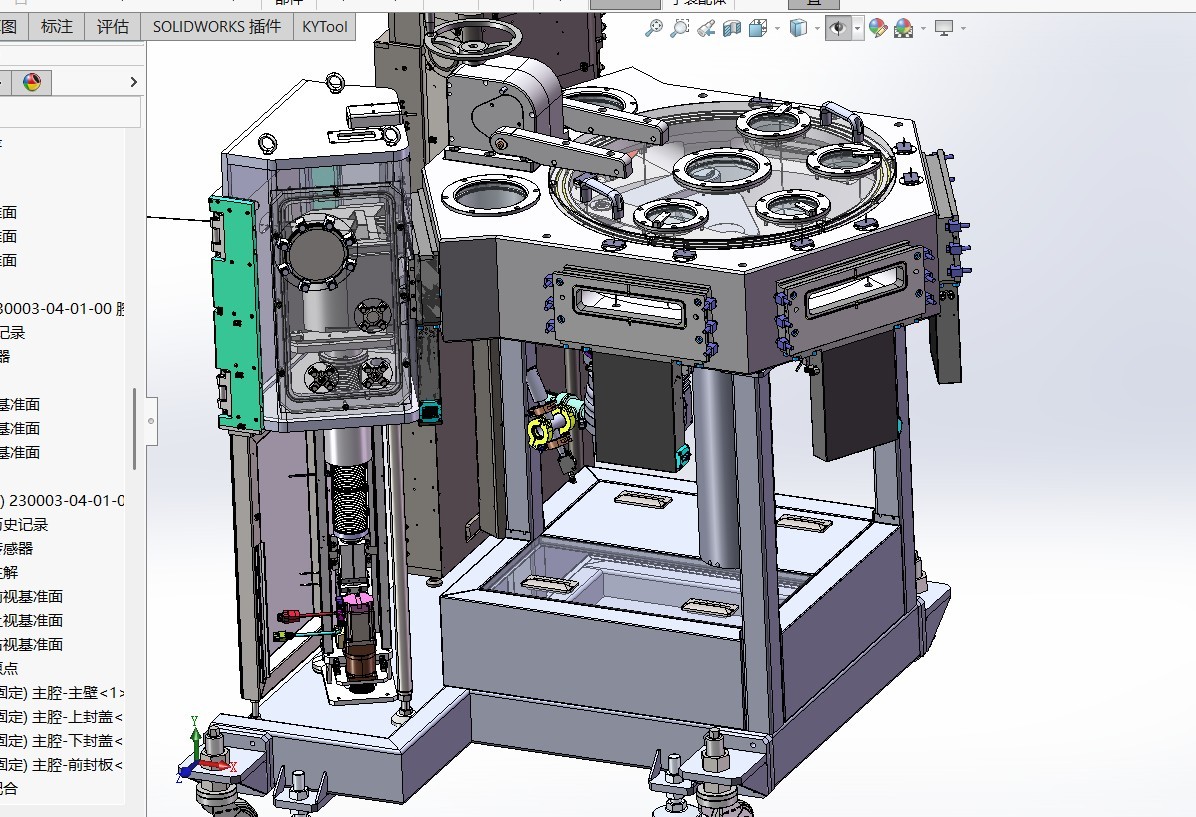
真空传输腔(TM Chamber): 核心刚性壳体,内部维持负压,提供各工艺腔的中央交汇平台。
真空机器人(Vacuum Robot): VTM 的心脏,通常采用全伺服驱动。为了最大化提升 UPH(每小时产能),主流设备采用双臂(Dual Arm)结构,可实现“一把手取走旧晶圆,另一把手顺势放入新晶圆”的快速交换(Swap)。
真空插板阀(Slot Valve / Gate Valve): 隔离 VTM 与工艺腔或锁气室的“闸门”。晶圆通过时开启,工艺进行时关闭,以防腔体间交叉污染或压力波动。
锁气室(Load Lock Chamber): 介于大气(EFEM)与真空(VTM)之间的缓冲带,进行快速抽真空(Pump-down)和充氮气回压(Vent)。
多道连续薄膜沉积(PVD/CVD): 避免晶圆在层与层沉积之间接触空气,防止表面发生不可控的原生氧化(Native Oxidation)或吸附微量水分。
先进封装高精度键合(Hybrid Bonding 等): 混合键合对表面平整度和粒子(Particle)污染的要求近乎苛刻。VTM 能够提供极致干净的传输环境,配合前段的高精度对准。
设计和开发 VTM,本质上是在解决“真空物理学、高动态高精度运动控制、以及零污染材料学”的交叉难题。
动密封难题: 机器人的电机、轴承必须在真空腔外部,或者采用特殊的结构。
传统方案: 采用 磁流体密封 传递旋转运动,既能保证气密性,又能实现无磨损的高速旋转。
先进方案: 采用 DD 马达(直接驱动马达) 与中空轴结构,取消传动带,减少因机械磨损产生的微尘。
放气率控制: 真空腔体内部结构件(如机械臂、手指 Blade)不能使用普通的润滑脂或多孔材料。必须使用特殊的真空级氟素润滑脂,金属表面需经过电化学抛光(EP),以将材料自身的放气率降到最低。
热变形补偿: 工艺腔(PM)内部往往伴随高温(例如几百摄氏度),机械臂手指(End-Effector)频繁出入高温区和低温区,会产生微米级的热膨胀。
纠偏技术:
在 VTM 的各个 Facet(接口面)通常会配置 晶圆检测传感器。
当机器人送片经过阀口时,传感器会动态捕捉晶圆边缘,计算出当前晶圆中心的实际偏差(Offset),并实时将数据反馈给控制系统(PC+PLC),在机械臂伸出(Extend)放片时进行动态位置补偿
由于真空环境下没有空气对流,微尘一旦产生,会由于重力或静电直接吸附在晶圆表面。
手臂联动机构设计: 减少关节处的相对摩擦。目前先进机器人多采用独特的 3环连杆机构 或 Boomerang 结构,在缩短旋转半径(节省空间)的同时,优化关节处密封。
手指材质:
普通工艺下使用石英或高纯铝合金。
在高温或需静电吸附的场景下,采用陶瓷(Al2O3)甚至集成静电卡盘(ESC)功能的手指,以实现无滑动的高加速传片。
锁气室从大气抽到真空,或者从真空充气到大气的过程中,气流的剧烈扰动最容易扬起腔体内部的微尘(称为 Turbulence 扬尘)。
VTM 系统必须通过控制算法实现慢速抽充气与快速抽充气的平滑切换,既要压制扬尘,又要保证 UPH 产能不能往下掉。
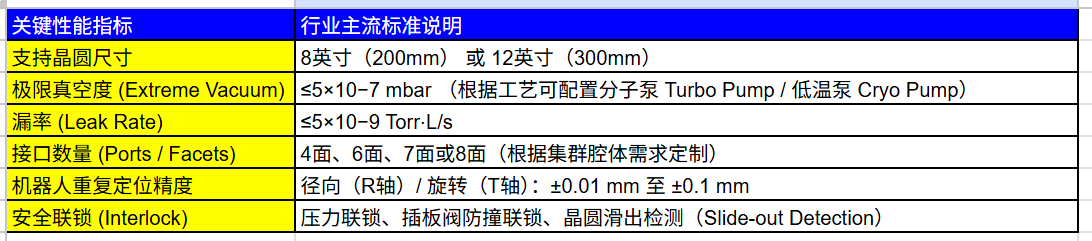
在实际评估或研发一个 VTM 模块时,业界标准的性能指标通常如下表所示:
随着半导体制程走向更小纳米节点,以及高级 3D 堆叠技术的普及,VTM 正在发生以下技术演变:
大数据与健康监测: 新一代 VTM 机器人(如部分大厂最新的真空机器人系列)内部开始集成大量的传感器,实时抓取电机的电流、振动频谱和轨迹磨损数据,利用 AI 算法在真空密封失效或皮带/轴承劣化前进行预测性维护。
晶圆边缘/背面防护: 为防止机械接触对晶圆边缘带来的应力损伤,非接触式或极低接触面积的末端执行器正逐步导入真空传输。

| # | 文件名称 | 大小 |
|---|---|---|
| 1 |  半导体前道设备之VTM/VTM.STEP
半导体前道设备之VTM/VTM.STEP
|
144.77M |
| 2 |
半导体前道设备之VTM/VTM半导体行业深度报告:国产替代核心部件,百舸争流加速崛起.pdf
|
5.47M |
| 3 |
半导体前道设备之VTM/半导体设备图纸更多下载www.semimodel.com - 副本 - 副本.pdf
|
290.75K |
| 4 |
半导体前道设备之VTM
|
0B |