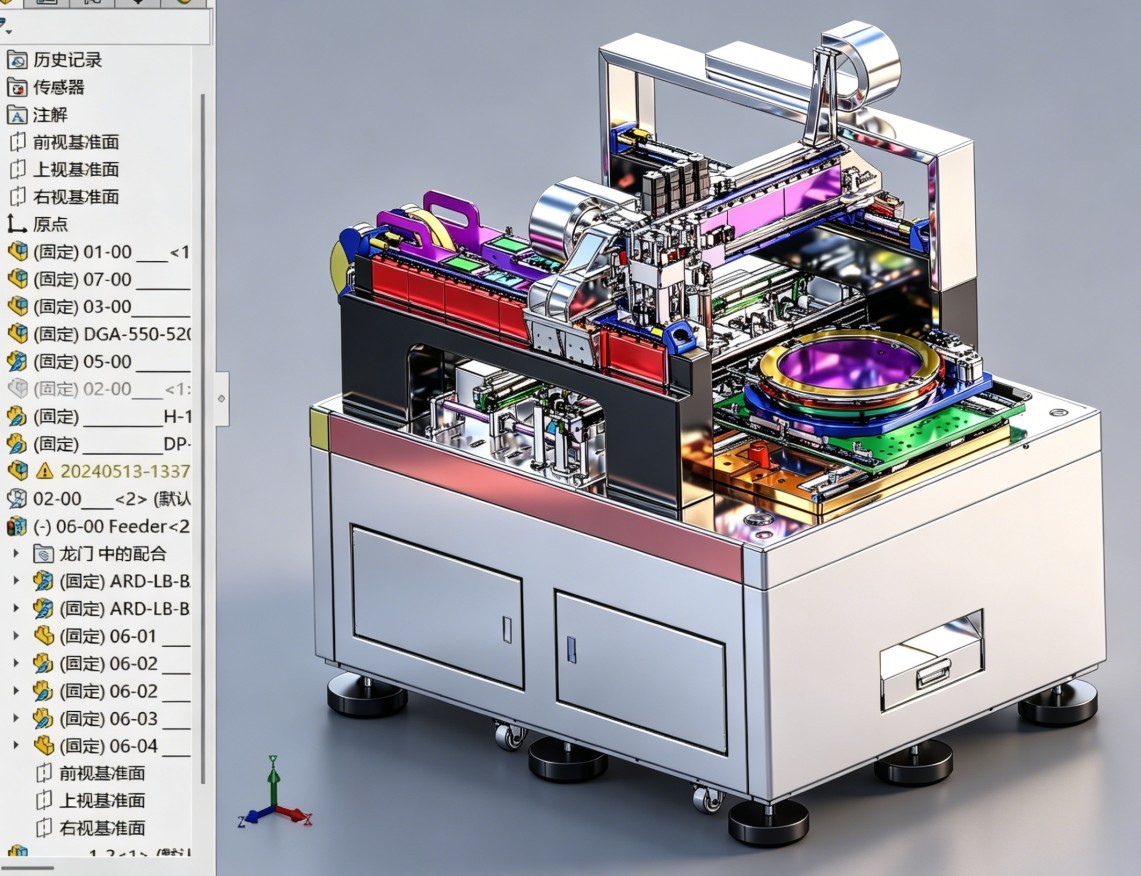
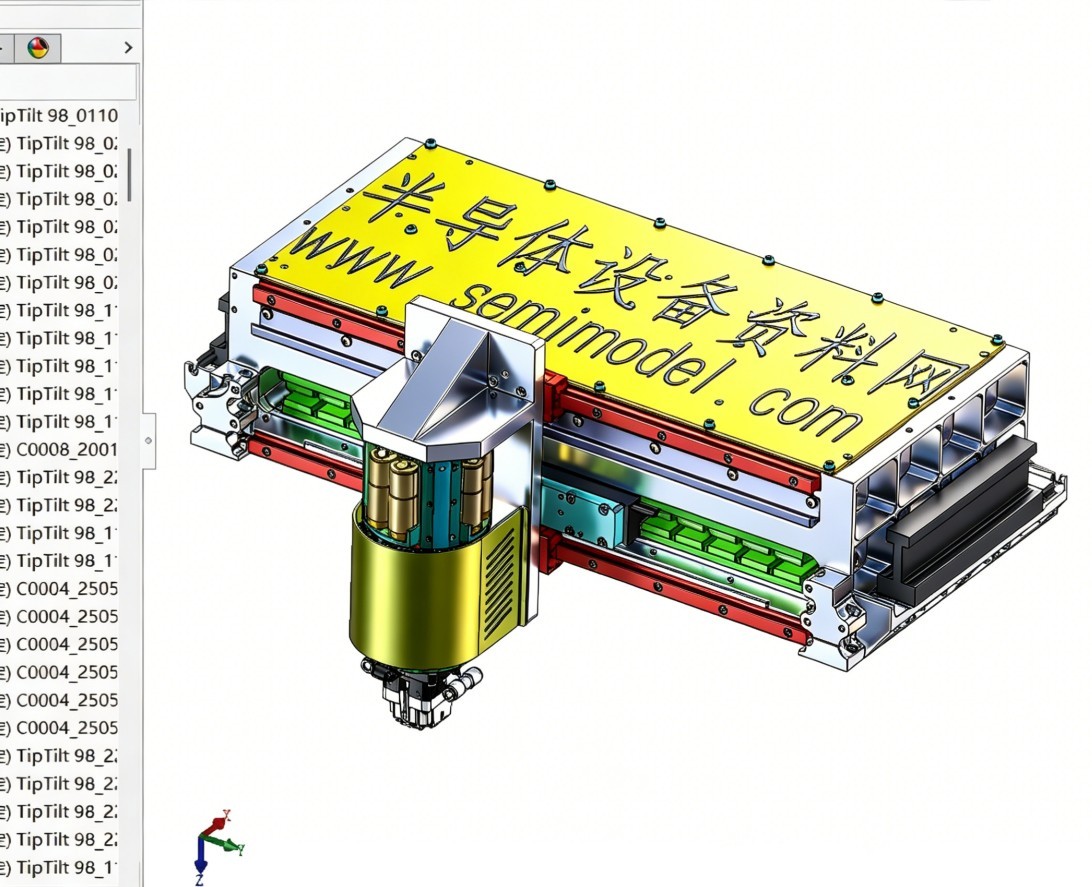
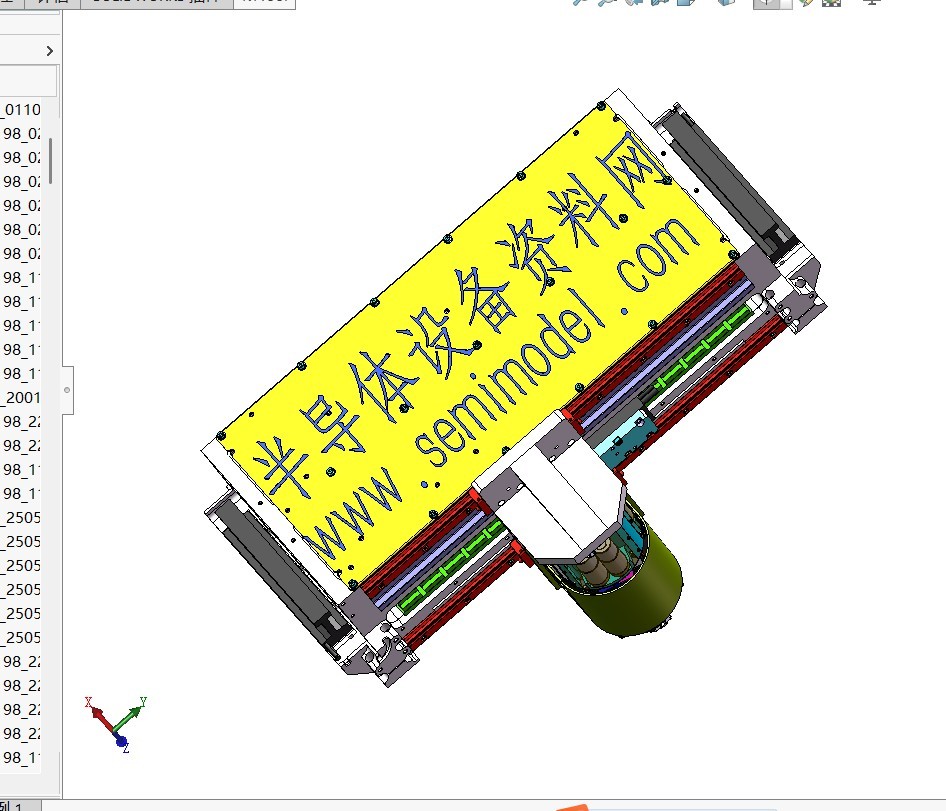
图纸为STP格式赠送TCB核心技术资料一份!这是来自欧洲那边的设计!采用柔性压电驱动!结构十分紧凑,也是目前最成熟和稳定的结构!目前先进封装最新技术,十分的硬核!请慎用!!!
半导体高精度键合机TCB-HEAD-TipTilt 指的是键合头(Bond Head)的姿态微调机构,即控制键合吸嘴(Collet/Pick-up Tool)在 theta_x(Tip)和theta_y(Tilt) 两个转动自由度上的精密对准系统。
在先进封装(如 3D IC、HBM、CoWos)中,随着凸点(Bump)间距(Pitch)缩小到微米级,Tip-Tilt 机构的设计直接决定了共面度(Coplanarity)和最终的键合良率。
TCB 键合头 Tip-Tilt 的核心技术:
在 TCB 键合过程中,芯片(Die)与基板(Substrate)之间必须达到绝对的平行(共面)。如果没有高精度的 Tip-Tilt 调整,会导致以下严重后果:
倾斜不均(Non-coplanarity):一侧凸点受到过度挤压(Over-compression)导致桥接短路(Bridge),而另一侧凸点未接触或接触不良(Open)。
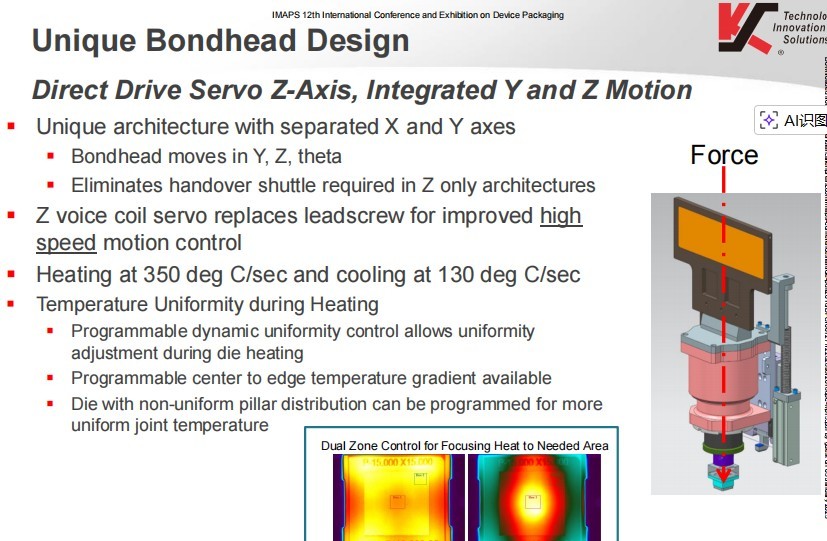
热应力失衡:TCB 涉及快速升温与降温(最高达 $400^\circ\text{C}$ 以上),如果初始接触面不平行,热膨胀会导致内部剪切力分布极不均匀,引发芯片翘曲(Warpage)或开裂。
高压力下的局部集中:TCB 键合力可达 200N~250N 甚至更高,微小的角度偏差(如数个毫弧度 $\text{mrad}$)在重载下都会导致局部的应力集中。
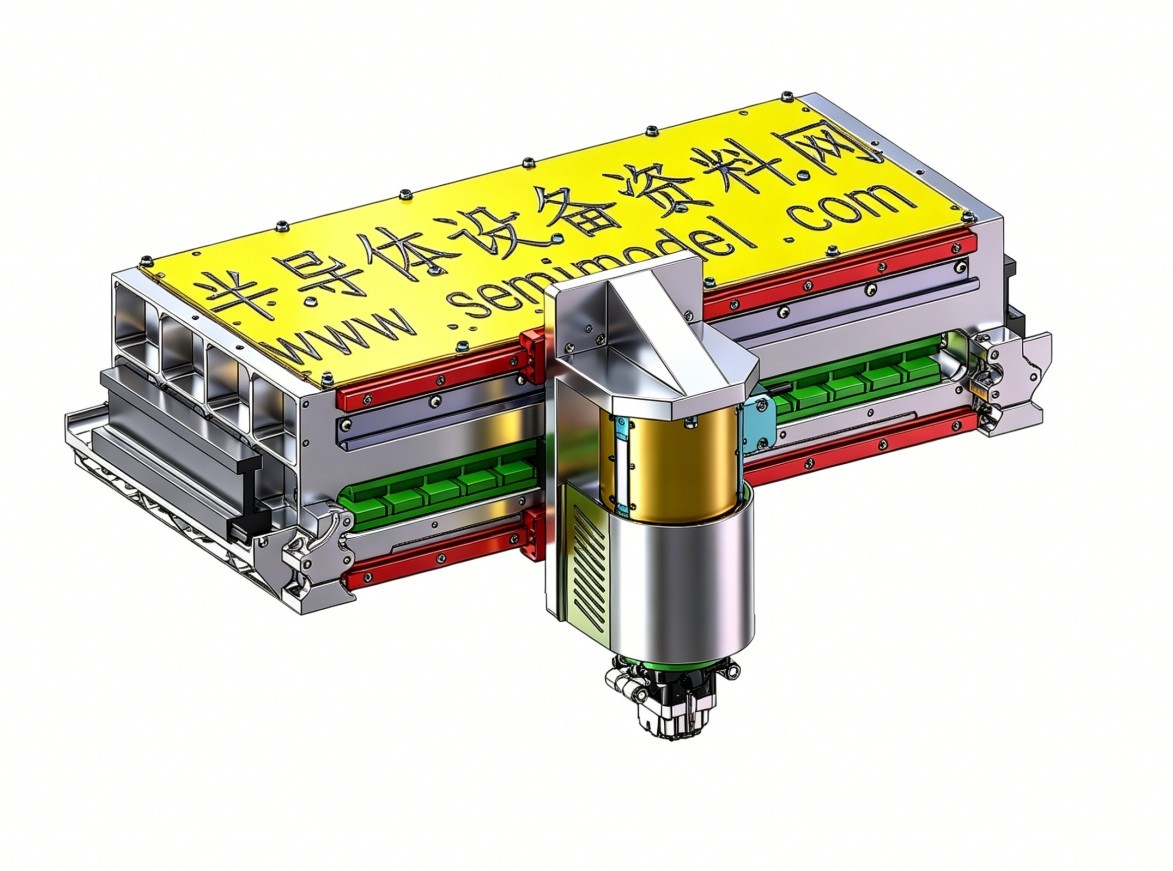
在空间受限、高动态、且带有高功率加热板(Heater)的键合头内部,Tip-Tilt 机构通常采用以下两种主流结构设计:
这是目前超高精度 TCB 头(纳米级分辨率)最常用的方案。
结构原理:利用整体式金属(如钛合金或特殊弹簧钢)加工出柔性滑块/柔性铰链(Flexure Mechanism)作为导向和旋转中心。
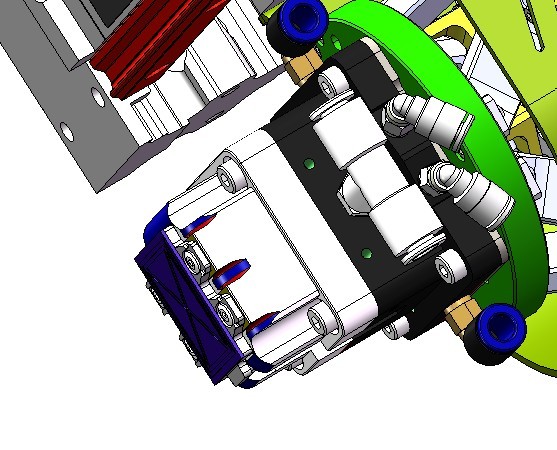
驱动方式:通过 2 个或 3 个高刚度的压电陶瓷驱动器(Piezo Actuator)推顶柔性结构。通过差动控制,实现 theta_x 和 theta_y的微幅旋转。
优缺点:
优点:无机械摩擦、无间隙(Zero Backlash)、刚度极高、响应速度极快(微秒级),非常适合在动态键合过程中进行实时补偿。
缺点:行程非常小(通常在数十微米以内)。
部分中高载荷的键合头会采用气浮球面静压结构。
结构原理:键合头内部设计有一个精密研磨的半球形气浮面。在未锁定状态下,高压气体使键合面处于几乎无摩擦的悬浮状态。
调整方式:通常配合接触式自适应对准(Passive Self-alignment)。当吸嘴吸附芯片压向基板(或校准块)时,利用物理接触力让气浮球面自动“顺应”对齐(基准自适应),随后通过真空或机械机构迅速锁死(Lock)该角度,再进行正式键合。
对于 TCB 键合头,Tip-Tilt 机构不仅仅是运动学问题,它还处于一个极端恶劣的物理环境中:
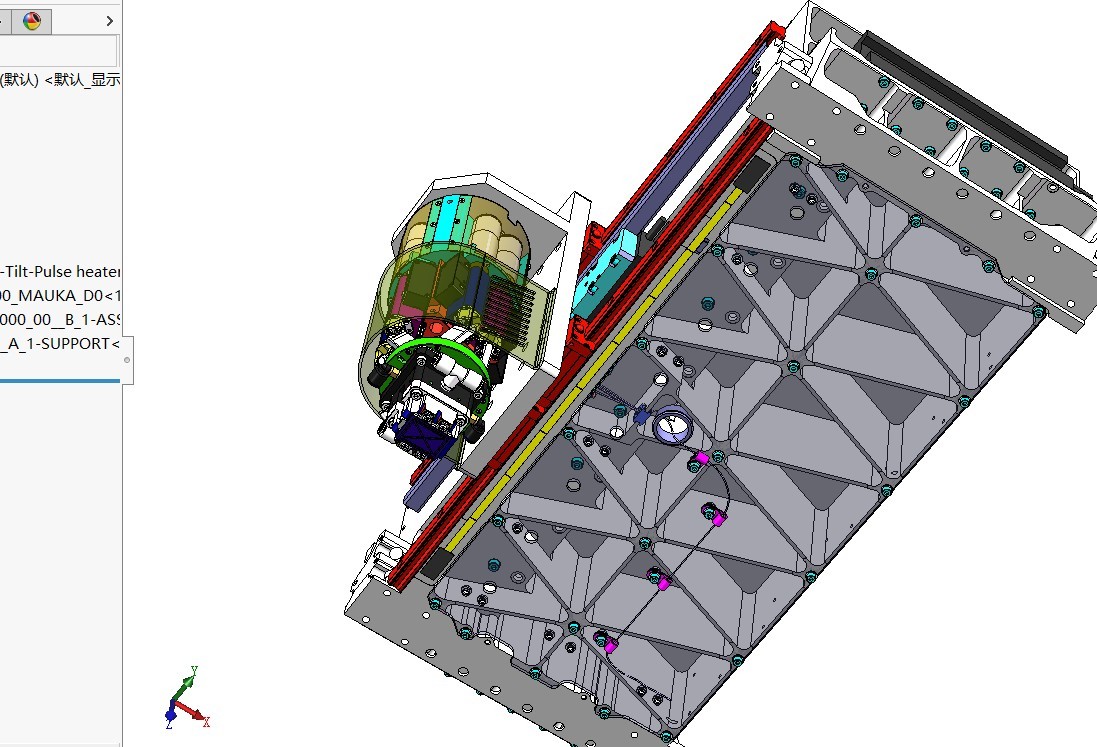
热传导与热隔离(Thermal Isolation): Heater 产生的几百皮特高温会向上传导。如果 Tip-Tilt 机构(尤其是压电陶瓷 PZT 或柔性铰链)受到高温波及,会产生严重的热漂移(Thermal Drift)或导致 PZT 损坏。因此,在吸嘴/加热板与 Tip-Tilt 机构之间,必须设计高刚度、低导热率的陶瓷隔热垫(如氧化锆或氮化硅)以及主动冷却通道(水冷/气冷)。
高刚度与抗冲击: 在 Z 轴向下施加 250N 的大键合力时,Tip-Tilt 机构在垂直方向(Z 方向)必须具备极高的抗压刚度,不能因为受到大外力而产生 Z 轴的非线性弹性下陷。
动态质量(Inertia): 为了实现高 UPH,键合头在 XY 方向会频繁进行高速启停(加速度可达 $1\text{G}\sim3\text{G}$)。Tip-Tilt 机构的设计必须极度轻量化(如采用碳化硅、钛合金等),以减小移动惯量,抑制残余振动。
静态/半静态校准:设备定期(或在更换 Tooling 后)将键合头压向高精度的标准力学传感器或光学共面测量仪,计算出固定形变和角度偏差,通过 Tip-Tilt 机构进行一次性补偿,并在后续生产中保持该锁定角度。
动态实时自适应:在每次键合的下压阶段,通过集成的多通道微型力传感器(Load Cell)实时监测四个角的受力平衡度。一旦发现单边受力过大,执行器(如 PZT)在毫秒内微调 Tip-Tilt 角度,实现真正的“软着陆”与均压键合。

| # | 文件名称 | 大小 |
|---|---|---|
| 1 |  TCB-HEAD-TipTilt/TCB Process Options.pdf
TCB-HEAD-TipTilt/TCB Process Options.pdf
|
2.34M |
| 2 |
TCB-HEAD-TipTilt/TCB TT HEAD 98.STEP
|
26.71M |
| 3 |
TCB-HEAD-TipTilt/半导体设备图纸更多下载www.semimodel.com - 副本 - 副本.pdf
|
290.75K |
| 4 |
TCB-HEAD-TipTilt
|
0B |